
Robot Vision mit EVT
Hauptmerkmale
Simple und intuitiv
Hand-Augen-Kalibrierung für Roboter und Handhabungssysteme
Keine Programmierkentnisse benötigt
Dank des Drag and Drop Features der EyeVision software
3D Objekterkennung
Dank 3D-Punktwolken-Auswertung
Hauptanwendungen
Bin Picking
Erkennen der Position und Form von Objekten. Finden und Heraussuchen von unsortierten Teilen in einer Schachtel
Palettieren und Depalettieren
Erkennung von Objekten durch Deep Learning. Ermöglicht schnelle, präzise und autonome Prozesse
Objektsortierung
Präzises Erkennen von Position und Form von Objekten. Aussortieren von falschen oder fehlerhaften Objekten
Pick and place
Lokalisieren und Platzieren von Objekten bei hohen Geschwindigkeiten
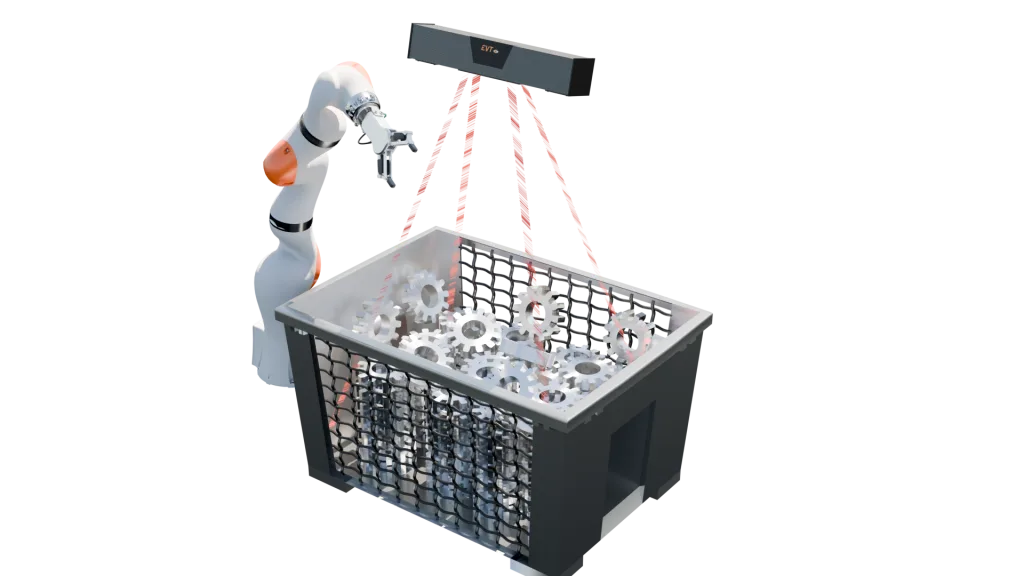
Bin Picking
Bin Picking ist eine automatisierte Technologie, bei der Roboter Gegenstände aus ungeordneten Behältern entnehmen. Mit Hilfe von 3D-Sensoren wird die genaue Position der Gegenstände im Raum erfasst und an den Roboter übermittelt. Diese Methode ist ideal, wenn die Gegenstände nicht vorsortiert sind und in beliebiger Ausrichtung vorliegen.
Sensor
3DSensoren für Tiefenwahrnehmung
Position der Objekte
Ungeordnete, zufällige Positionen und Ausrichtungen
Komplexität und Herausforderungen
Erkennen von überlappenden, verdrehten oder schwer greifbaren Objekten erfordert 3D-Erkennung und Kollisionsvermeidung -> hohe Komplexität
Palettieren und Depalettieren
Palettieren und Depalettieren mit Robot Vision ermöglicht das automatische Stapeln und Entnehmen von Gütern durch intelligente Bildverarbeitung. Durch den Einsatz von 2D- oder 3D-Kameras erkennen Roboter die Position, Ausrichtung und Form von Objekten und ermöglichen so eine präzise Handhabung ohne manuelles Eingreifen. Diese Technologie steigert die Effizienz in Logistik und Produktion, indem sie die Arbeitsabläufe beschleunigt und Fehler reduziert.
Sensor
2D/3DKameras für Objekterkennung und Orientierung
Position der Objekte
Meist sortiert auf Paletten
Komplexität und Herausforderungen
Gewährleistung der Stabilität der gestapelten Objekte - erfordert präzise Stapel-/Entnahmepositionen
Objekt-Sortierung
Die Objektsortierung mit Robot Vision ermöglicht die automatische Erkennung, Klassifizierung und Sortierung von Objekten anhand von Merkmalen wie Form, Farbe, Größe oder Codes. 2D oder 3D Vision-Systeme liefern dem Roboter Informationen über Objekte welche anschließend richtig sortiert werden können. Diese Technologie erhöht die Effizienz in Produktion und Logistik, reduziert Fehler und minimiert den manuellen Aufwand.
Sensor
2D/3D-Kameras für die Klassifizierung
Position der Objekte
Geordnet oder ungeordnet, aber klassifizierbar
Komplexität und Herausforderungen
Korrekte Erkennung von überlappenden, verdrehten und variablen Objekten bei teils hohen Geschwindigkeiten
Pick-and-Place
Pick-and-Place mit Robot Vision ermöglicht das präzise Aufnehmen und Ablegen von Objekten durch Roboter und intelligente Bildverarbeitung. 2D-Kameras erfassen die Position, Orientierung und Eigenschaften der Objekte und übermitteln diese Informationen an den Roboter. So lassen sich Bauteile, Werkstücke oder Produkte effizient und fehlerfrei bewegen, was die Automatisierung in Produktion, Logistik und Montage deutlich verbessert.
Sensor
2D Kameras für Objekterfassung
Position der Objekte
Meistens sortiert oder bekannt
Komplexität und Herausforderungen
Präzise Handhabung und unterschiedliche Objektformen - erfordert präzise Positionsbestimmung
