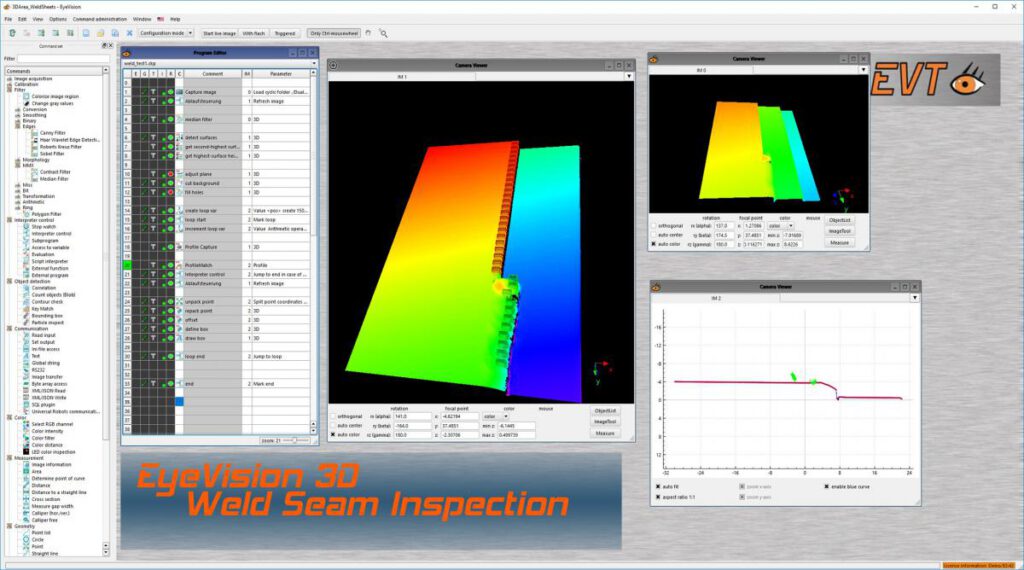
Mit EyeVision 3D kann eine Schweißnaht auf Fehler inspiziert werden.
Der ProfileMatch Befehl ist ein Matching Tool für 1D Anwendungen, wie z.B. um eine Schweißnaht oder eine Kleberaupe auf ihre Korrektheit zu überprüfen.
Der Anwender muss dabei nur wenige Schritte ausführen:
- Zuerst wird mit dem Befehl eine Form eingelernt und
- der Befehl erkennt dann, ob das erwartete Profil mit dem tatsächlichen Profil übereinstimmt.
Das Profile Match Tool schlägt Alarm bei Fehlern wie „Fläche“. Das sind so genannte „Auswüchse“ bzw. bezeichnet eine Fehlerstelle wo, z.B. eine Schweißnaht zu dick, d.h. zu viel Fläche bildet. Und es gibt Fehler wie „Löcher“. Das sind Fehlerstellen wo, z.B. bei einer Kleberaupe der Auftrag unterbrochen ist oder der Auftrag zu schmal ist.
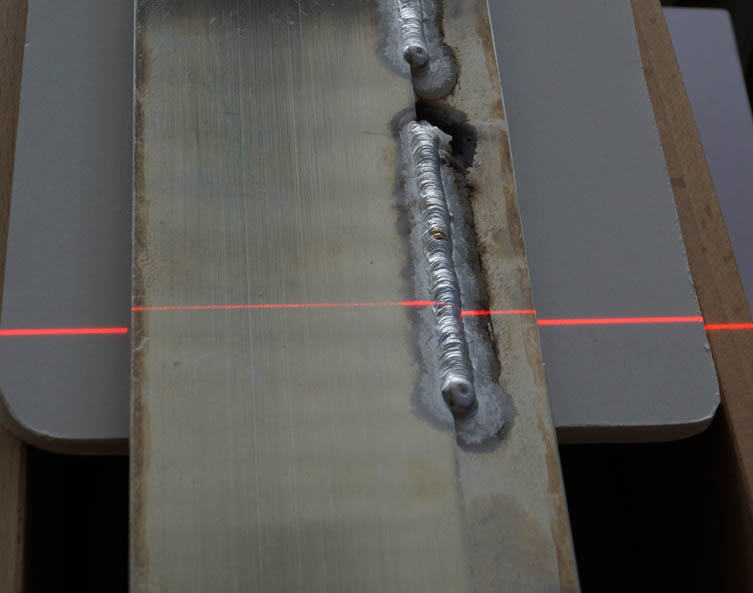
Fehlerkriterien der Schweißnaht
Fehlerkriterien können z.B. sein:
- endkraterfreie Ausführung der Naht
- Nahtbreite und -länge
- fehlende Naht
- Nahteinfall
- Löcher und Oberflächenporen in der Naht
- Nahtanbindung
- Ungleichschenkeligkeit
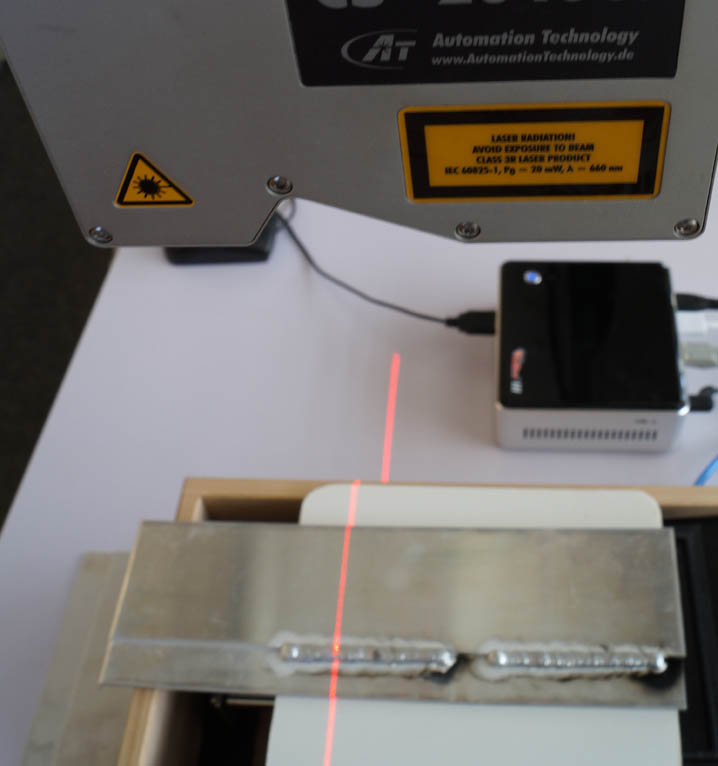
Sobald einer dieser Fehler erkannt wird, berechnet EyeVision sofort die Abweichung und gibt ein Signal aus. Die Schweißnaht kann nun überarbeitet werden. Als Hardware für die Inspektion von Schweißnähten oder Kleberaupen eignet sich besonders gut der 3D Lasertriangulationssensor EyeScan 3D. Dieser misst das Höhenprofil indem eine Laserline auf die Schweißnaht projiziert wird. Durch die automatische Objektnachführung innerhalb des Bildfeldes werden auch Schweißnähte oder Kleberaupen innerhalb des Arbeitsbereiches erkannt, die das eingelernte Profil überschreiten. Somit entgeht der Software nichts!
Berechnung der Abweichung und Höhenversatzausgleich
- Im Falle eines Fehlers, wird auch berechnet wie groß die Abweichung ist.
- Zudem verfügt der Befehl auch über einen Höhenversatz.
Das heißt, auch wenn die Höhe nicht mit der des eingelernten Profils übereinstimmt, findet der Befehl das Profil trotzdem.
3D Lasertriangulationssensoren als Methode für den Profilscan
- der Profilscanner misst das Höhenprofil der Schweißnaht, indem er eine Laserlinie auf das Objekt projizieren und seitlich mit einem Kameraelement den Linienverlauf erfasst
- der Laserlichtstrich wird in analoge elektrische Signale umgewandelt, digitalisiert sowie in reelle Weltkoordinaten umgerechnet