
EyeVision 3D is ideal for 3D bin-picking, which is one of the most widely used applications in the industry. This makes it easy to automate production processes.
How does EyeVision Bin-Picking work?
With the Bin-Picking command of EyeVision 3D it is possible to
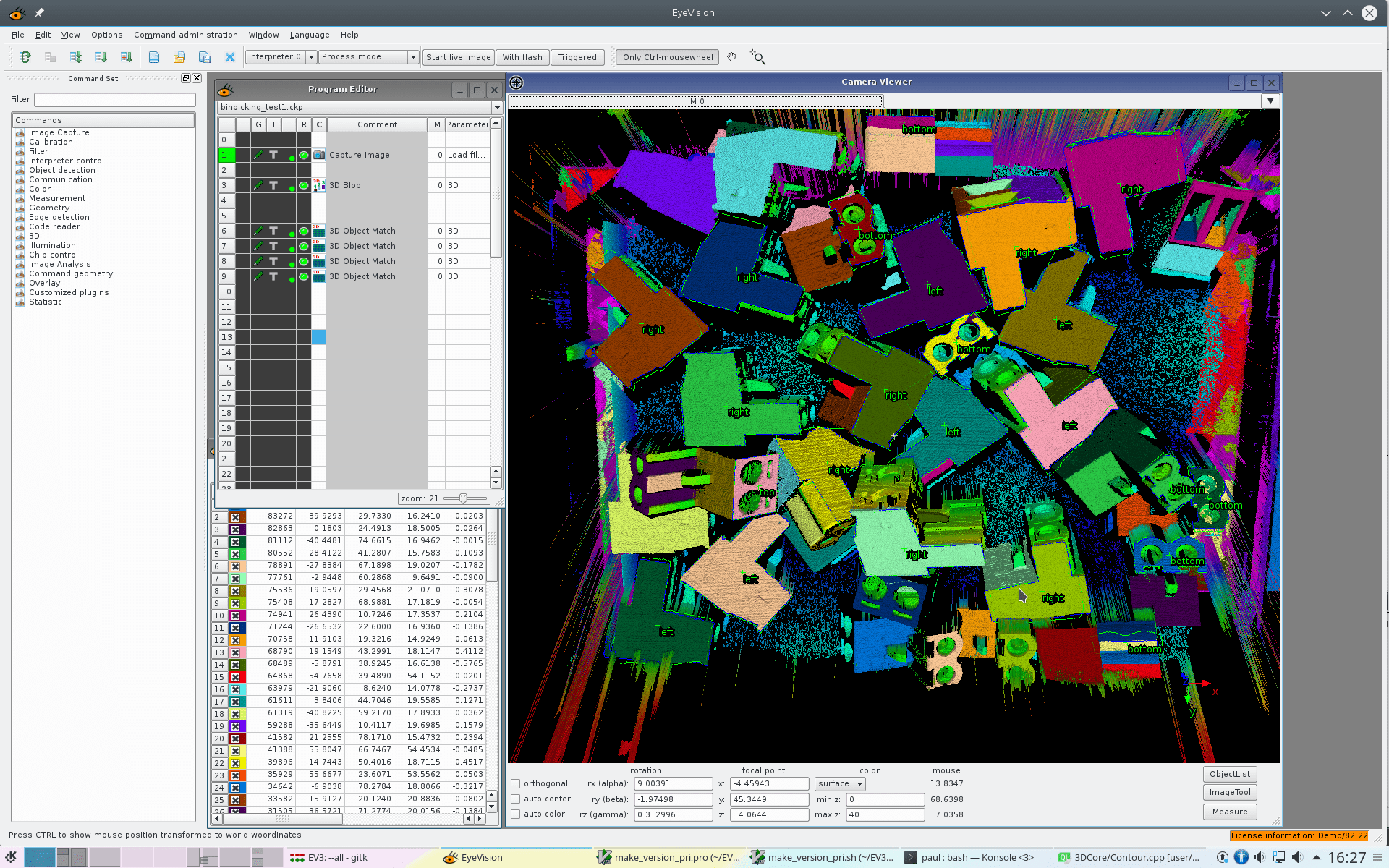
- recognise the position and shape of each object
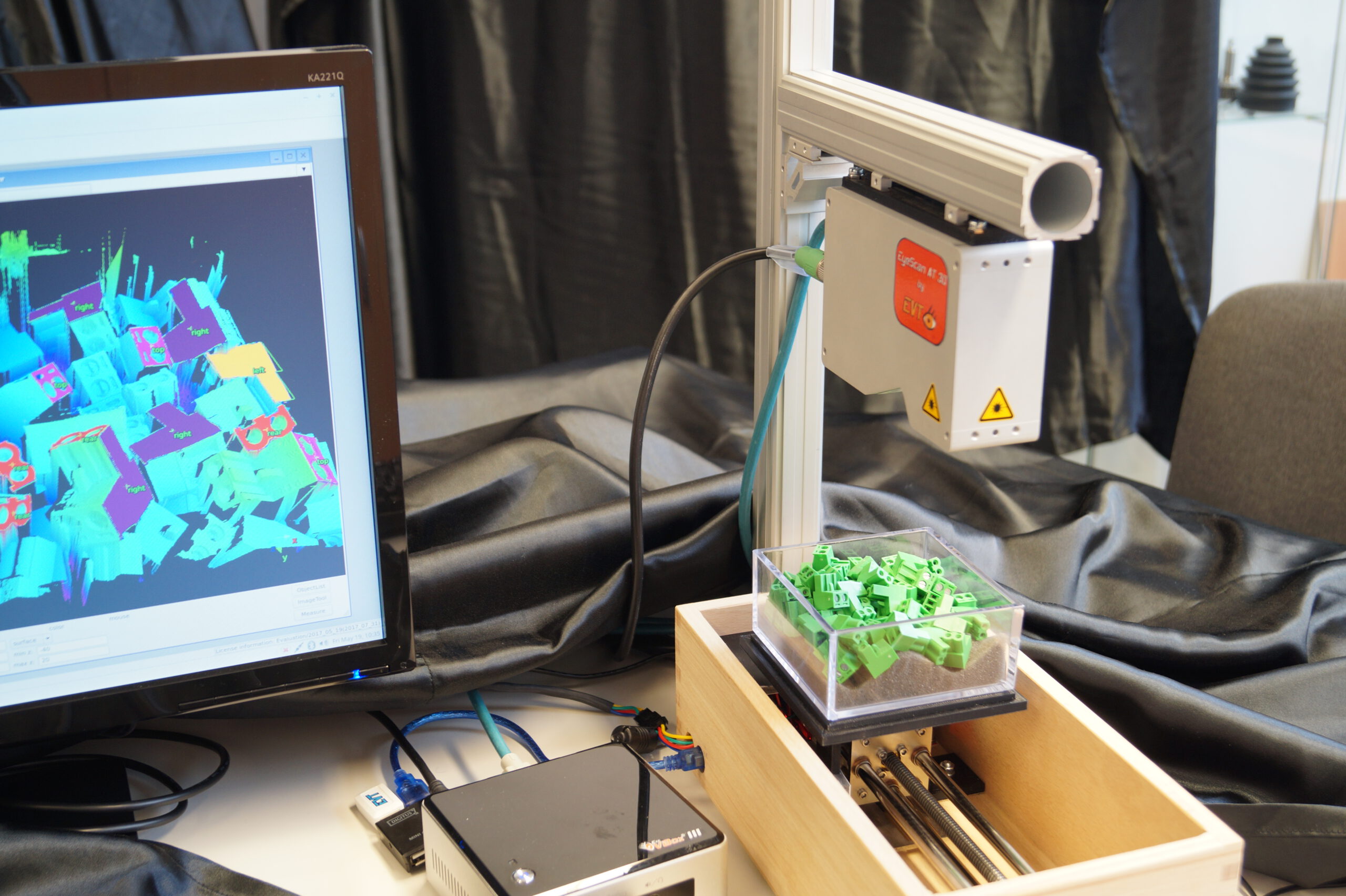
- find unsorted parts in a box, pick them out with a robot and feed the part to a processing machine
- send the position of each part found in a box to a robot
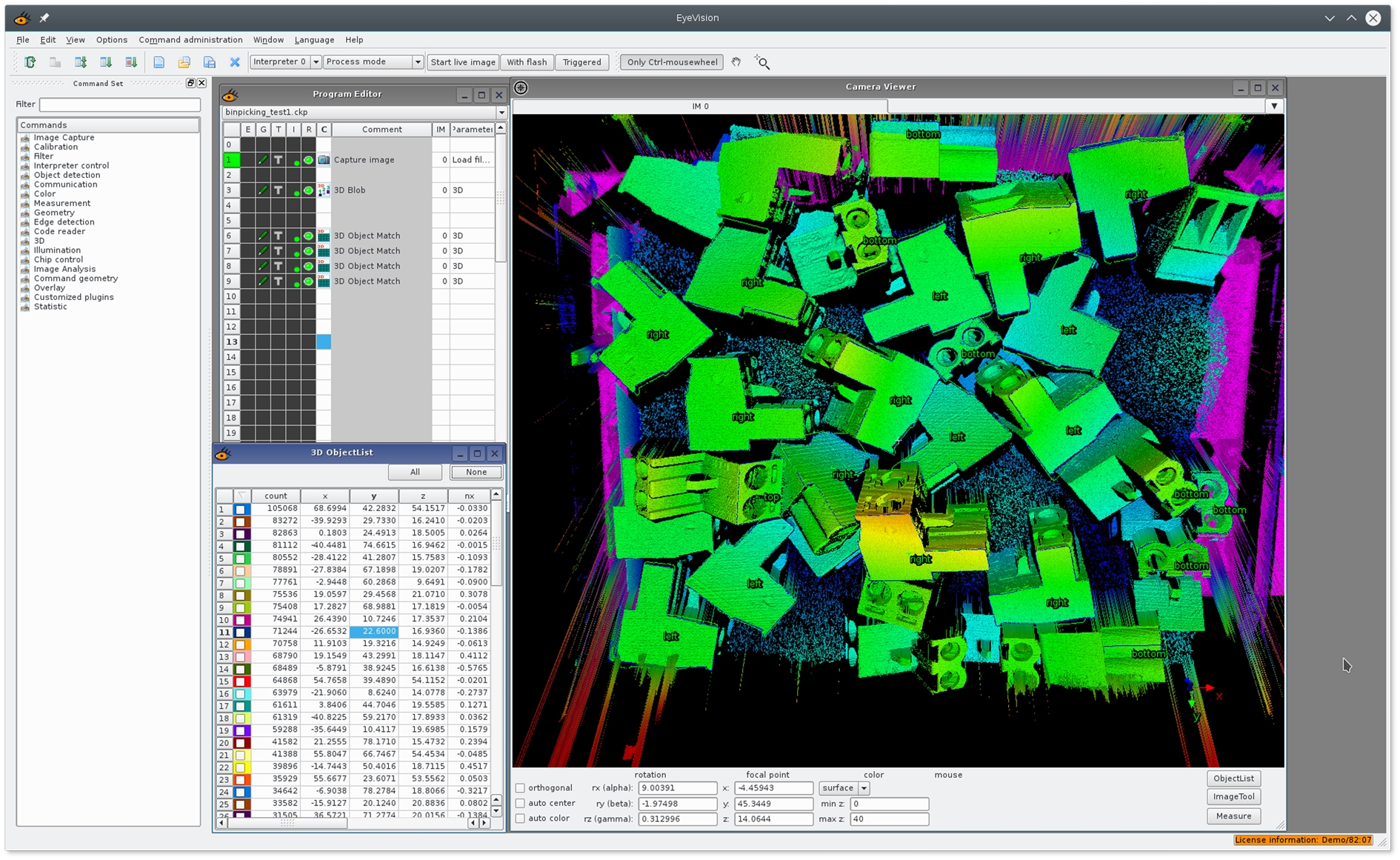
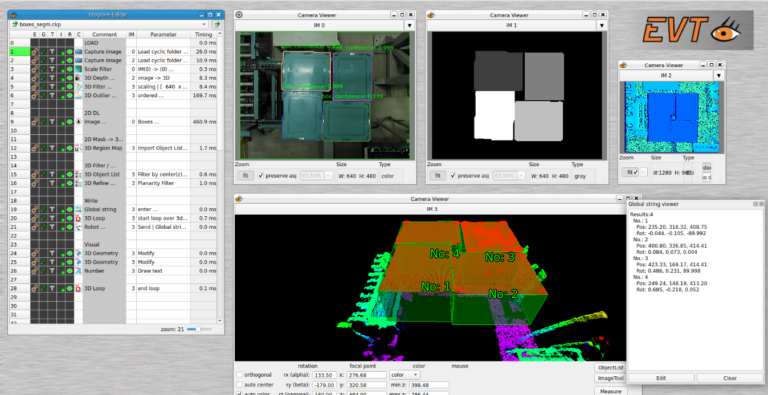
With the 3D matching of EyeVision 3D, it is now possible to recognise the shape and position of any previously trained object with just one 3D sensor. This makes it possible to grip even complicated shapes and components.
Advantages
With EyeVision 3D, images of the part surface are captured quickly and 3D point clouds can be used directly in the EyeVision 3D interface to calculate the respective position of the individual parts.
EyeVision 3D forms the basis for numerous industrial automation systems and sophisticated services.
The software offers 3D measurements in the production process, in the 3D RobotVision area, as well as in the packaging and logistics area, measuring and comparing in 3D.
Even demanding applications such as loose, stacked cartons or bags lying on top of each other etc. are reliably detected and the correct gripping data is transmitted to the robot via the 3D data. The entire sequence can be put together quickly and easily using drag-and-drop, after which the robot works autonomously.
The Hand Eye calibration enables the correction of the absolute accuracy. As a result, the robot can grip even the smallest components safely and repeatedly in the entire installation space. The correction values are determined automatically and with minimal effort.
The multi-camera support of the EyeVision not only enables precise gripping, but also the placement of the components at the target with camera support. This means that even with different components (e.g. cartons), they can be stacked in the appropriate spaces.
By supporting all camera types of the EyeVision software (1D, 2D, 3D and thermal cameras), the appropriate camera can be selected for the task to be solved. For example, a 3D camera to remove the components from the box and a 2D camera to place them in another location.
As always, the software is integrated completely graphically and for communication with the robot and all other systems, a variety of interfaces are available, including OPC UA, Profinet, TCP IP and others.