
EyeVision 3D eignet sich hervorragend für 3D Bin-Picking, welches eine der meist gebrauchten Anwendungen in der Industrie ist. Damit lassen sich Produktionsabläufe einfach automatisieren.
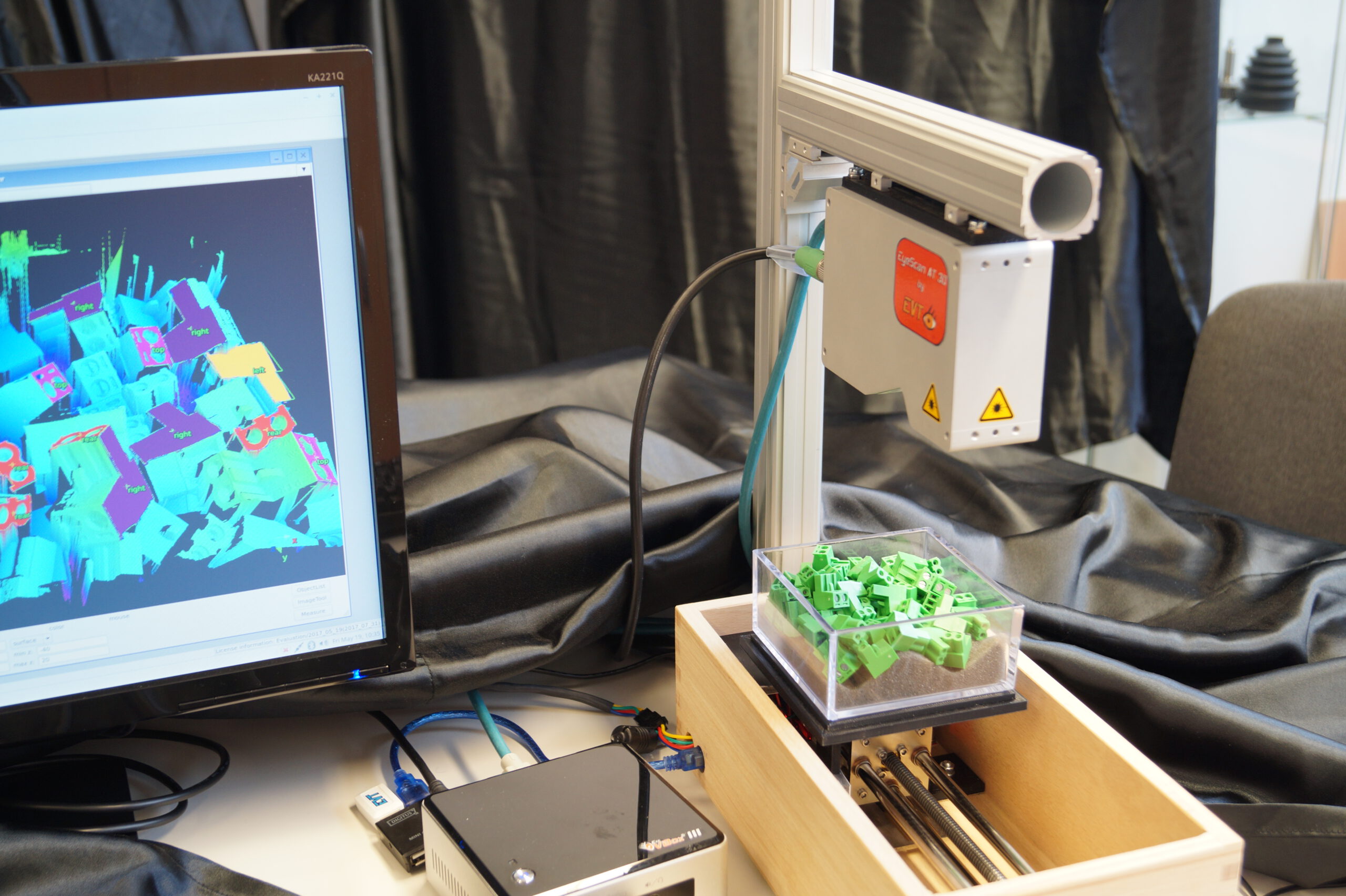
Wie funktioniert EyeVision Bin-Picking?
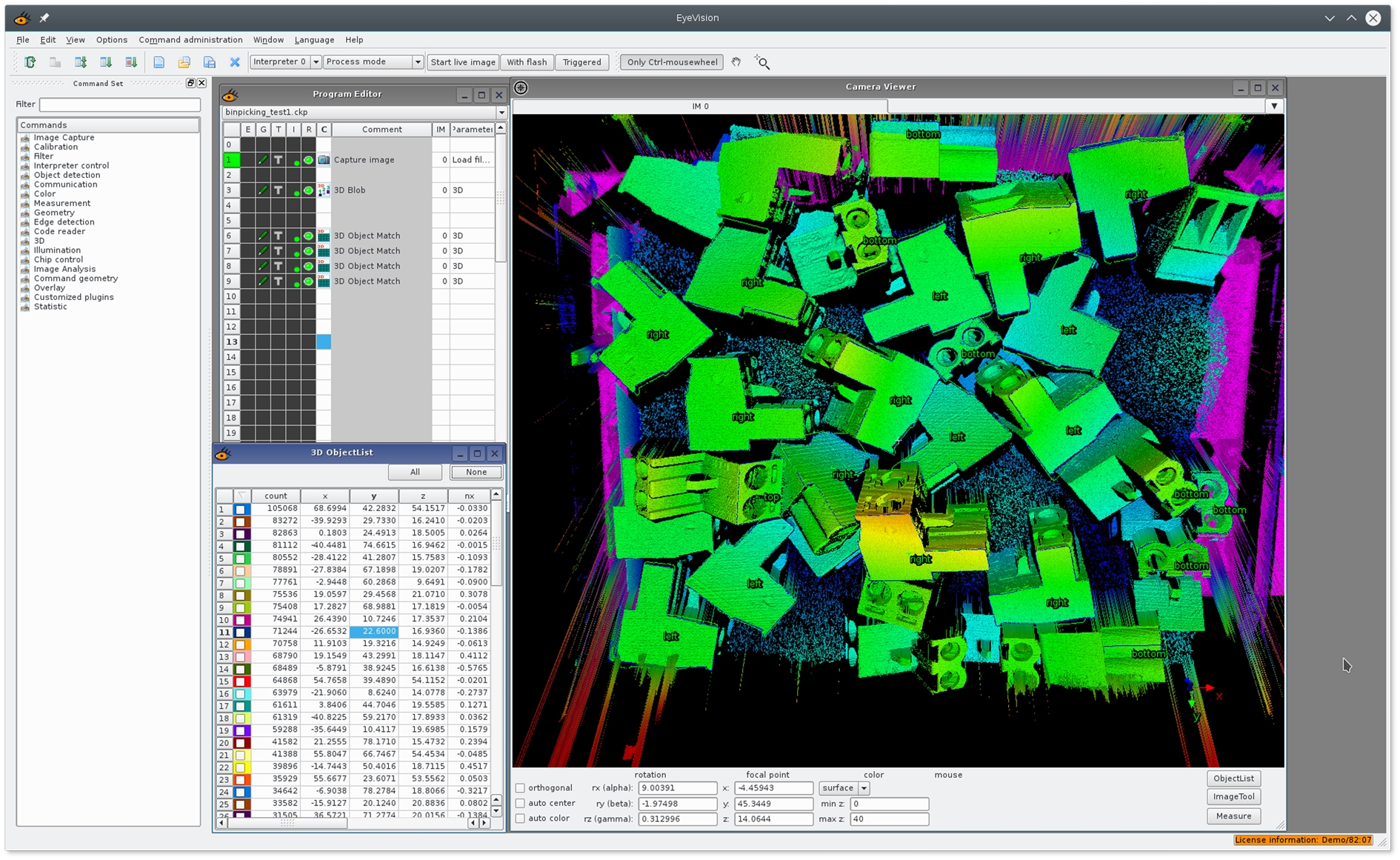
Mit dem Bin-Picking Befehl von EyeVision 3D ist es möglich:
- die Position und Form jedes Objekts zu erkennen
- unsortierte Teile in einer Box zu finden, mit einem Roboter herauszugreifen und das Teil einer Bearbeitungsmaschine zuzuführen
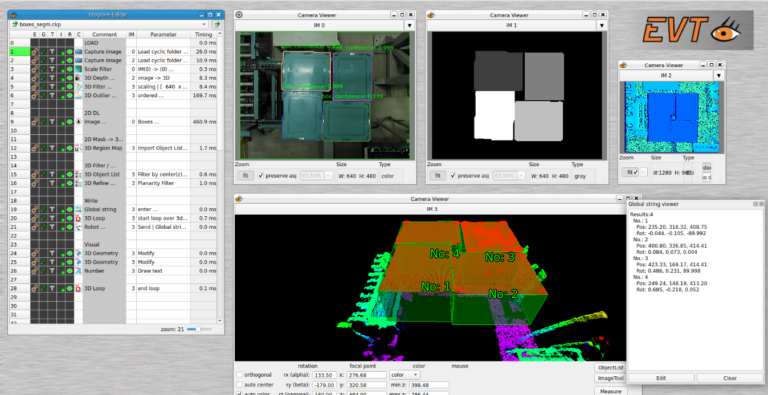
- die Position von jedem gefundenen Teil in einer Box an einen Roboter zu schicken
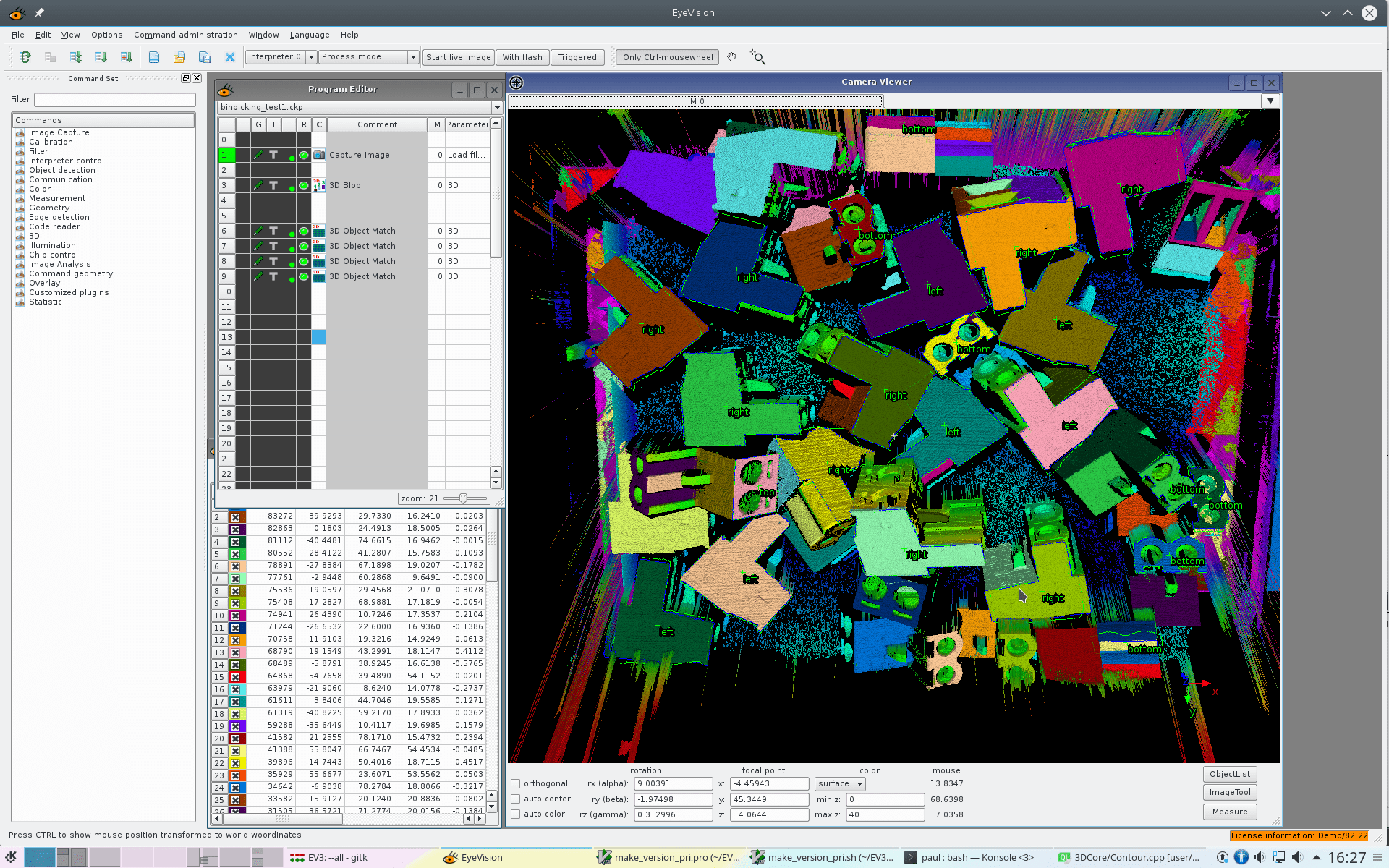
Mit dem 3D-Matching der EyeVision 3D ist es nun möglich mit nur einem 3D-Sensor die Form und Lage eines beliebigen, vorher trainierten Objekts zu erkennen. Somit wird das Greifen selbst von komplizierten Formen und Bauteilen ermöglicht.
Vorteile
Mit EyeVision 3D erfolgt eine schnelle Bildaufnahme der Teileoberfläche und 3D Punktewolken können direkt in der EyeVision 3D Oberfläche benutzt werden um die jeweilige Lage der einzelnen Teile zu errechnen.
EyeVision 3D bildet die Basis für zahlreiche Systeme in der industriellen Automation, sowie anspruchsvolle Dienstleistungen.
Die Software bietet 3D Messungen im Produktionsprozess, im 3D RobotVision Bereich, sowie Verpackungs- und Logistikbereich, Vermessen und Vergleichen in 3D.
Der sichere Griff in die Kiste (Bin Picking) ist die Kombination aus dem präzisen Erkennen mit Künstlicher Intelligenz einer korrekten Position im Raum mit 3D und der Roboter Hand Eye Kalibrierung. Diese Funktionen sind in der EyeVision Software vereint und ermöglichen schnelles und einfaches Bin Picking.
Selbst anspruchsvolle Anwendungen wie zum Beispiel lose, gestapelte Kartons oder übereinander liegenden Säcken usw. werden sicher erkannt und die korrekten Greifdaten werden über die 3D-Daten an den Roboter übermittelt. Der gesamte Ablauf kann dabei einfach und schnell per Drag-and-drop zusammengestellt werden, danach arbeitet der Roboter autonom.
Durch die Hand Eye Kalibrierung wird die Korrektur der Absolutgenauigkeit ermöglicht. Dadurch kann der Roboter im gesamten Bauraum, selbst kleinste
Bauteile sicher und wiederholt greifen. Die Korrekturwerte werden dabei automatisch und mit minimalem Aufwand ermittelt.
Über die Multikamera Unterstützung der EyeVision kann nicht nur das präzise Greifen, sondern auch die Ablage der Bauteile am Ziel kameragestützt erfolgen. Damit können auch bei unterschiedlichen Komponenten (z.B. Kartons) diese in die passenden Freiräume gestapelt werden.
Durch die Unterstützung sämtlicher Kameraarten der EyeVision Software (1D, 2D, 3D und Thermokameras) kann jeweils die passende Kamera für die zu lösende Aufgabe gewählt werden. Beispielsweise eine 3D-Kamera um die Bauteile aus der Kiste zu entnehmen und eine 2D Kamera um diese an einem anderen Ort abzulegen.
Die Integration der Software erfolgt wie immer komplett grafisch und für die Kommunikation zu dem Roboter und allen anderen Systemen, stehen eine Vielzahl von Schnittstellen zur Verfügung u.a. OPC UA, Profinet, TCP IP et.