
Applications:
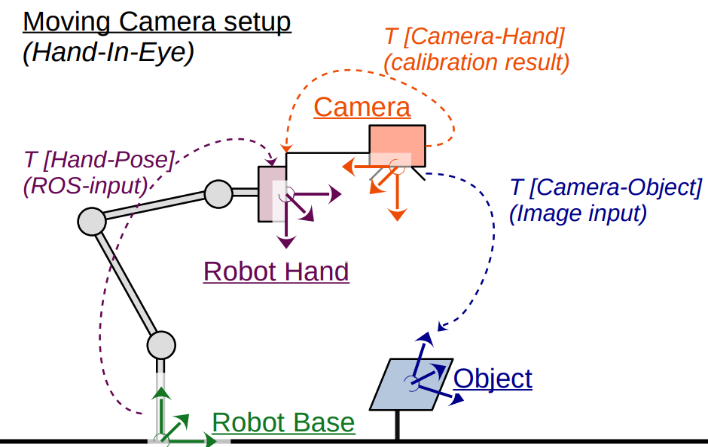
The 3D Robot Calibration command allows capturing object positions in point clouds even when captured by a moving camera. For example in a bin picking application where the camera is attached to the robot arm.
Functions:
The command converts the point clouds from a camera frame to the robot base frame. Then all positions and rotations found in the point cloud can be used for robot positioning. For illustration, the following object was captured from several different positions of the robot hand:
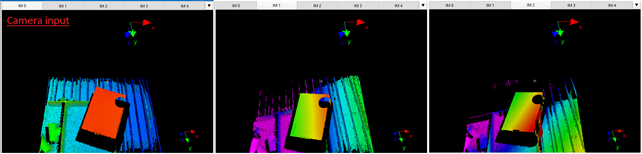
After the 3D Robot Calibration command applies the calibration to all three images, they all look the same since they are now in robot base coordinates.
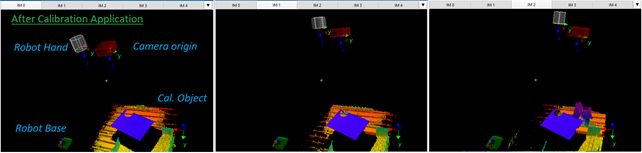
A full example, including the initial creation of a calibration and how to apply it, can be found here.