Application:
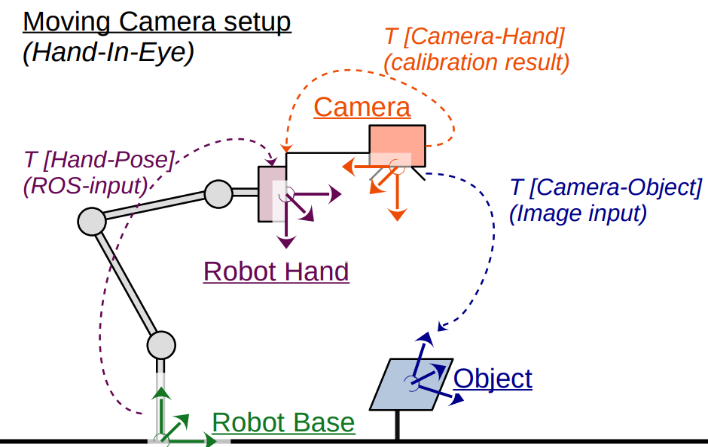
The 3D robot calibration command makes it possible to capture object positions in point clouds even if they were captured by a moving camera. For example, in a bin-picking application where the camera is attached to the robot arm.
Functions:
The command converts the point clouds from a camera coordinate system to the robot coordinate system. All positions and rotations found in the point cloud can then be used for robot positioning.
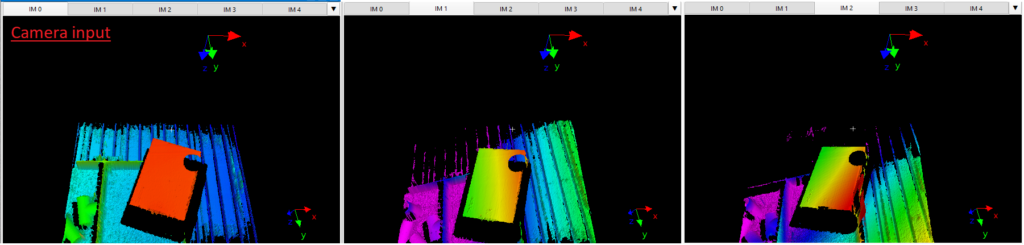
To illustrate this, the following object was recorded from several different positions of the robot hand:
Translated with DeepL.com (free version)
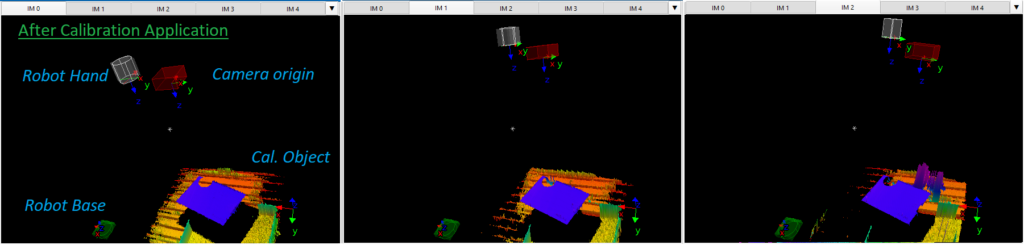
After the 3D Robot Calibration command has been applied to all three point cloud images, these point clouds look the same because they have been transferred to robot base coordinates.